 |
|
반도체 라인 웨이퍼 흐름 |
주주총회소집공고
| 2021년 7월 27일 | ||
| 회 사 명 : | 주식회사 라온테크 | |
| 대 표 이 사 : | 김 원 경 | |
| 본 점 소 재 지 : | 경기도 수원시 권선구 산업로 156번길 88-4(고색동 1138번지) | |
| (전 화) 031-201-0000 | ||
| (홈페이지)http://www.raonrobot.com | ||
| 작 성 책 임 자 : | (직 책)이사 | (성 명)김강훈 |
| (전 화)031-201-0000 | ||
주주총회 소집공고
| (제22기 임시주주총회) |
주주님의 깊은 관심과 성원에 감사드립니다.
당사는 상법 제363조와 정관 제 18 조에 의거 임시주주총회를 아래와 같이 개최 하오니 참석하여 주시기 바랍니다.
- 아 래 -
1. 일 시 : 2021년 8월 12일(목요일) 오전 10시 00분
2. 장 소 : 경기도 수원시 권선구 산업로 156번길 88-4(고색동) 당사 회의실
3. 회의 목적 사항
가. 부의안건
제 1호 의안 : 이사 선임의 건
- 사외이사 박영순 신규 선임의 건
4. 실질주주의 의결권 행사에 관한 사항
금번 당사의 주주총회에는 자본시장과 금융투자업에 관한 법률 부칙(법률 제11845호, 2013.5.28.) 제18조에 따라 동법의 종전 규정 제314조 ⑤항에 의거 한국예탁결제원이 주주님들의 의결권을 대리행사 할 수 없습니다.
따라서 주주님이 주주총회에 참석하여 의결권을 직접적으로 행사하시거나,
대리인에 위임하여 의결권을 간접적으로 행사 하실 수 있습니다.
5. 주주총회 참석시 준비물
- 직접행사 : 신분증
- 대리행사 : 위임장(주주와 대리인의 인적사항 기재, 인감 날인), 대리인의 신분증
6. 코로나바이러스 감염증(COVID-19)에 관한 안내
코로나바이러스 감염 및 전파를 예방하기 위하여 주주총회장 입장 전
열화상 카메라를 비치하여 체온을 측정할 예정이며 당일 발열, 기침 증세가 있으신
주주님은 주주총회장 출입이 제한될 수 있습니다. 또한, 마스크 미착용 주주님께서
도 출입이 제한될 수 있으니, 주주총회장 입장 시 반드시 마스크를 착용하여 주시
기 바랍니다.
2021년 7월 27일
주식회사 라온테크
대표이사 김원경 (직인생략)
I. 사외이사 등의 활동내역과 보수에 관한 사항
1. 사외이사 등의 활동내역
가. 이사회 출석률 및 이사회 의안에 대한 찬반여부
| 회차 | 개최일자 | 의안내용 | 사외이사 등의 성명 |
|---|---|---|---|
| 오문성 (출석률: 100%) |
|||
| 찬 반 여 부 | |||
| 1 | 2021.01.24 | 의안제목 : 주식매수선택권 취소의 건 주요내용 : 임직원 퇴사로 인한 주식매수선택권 취소 |
찬성 |
| 2 | 2021.02.15 | 의안제목 : 제21기 재무제표 승인의 건, 전자투표 도입 승인의 건 주요내용 : 2020년 재무제표(내부결산) 승인, 제21기 정기주주총회부터 전자투표 도입 |
찬성 |
| 3 | 2021.02.15 | 의안제목 : 제21기 내부회계관리제도 운영 및 평가 보고의 건 주요내용 : 2020년 내부회계관리제도 운영 및 평가결과 보고 |
찬성 |
| 4 | 2021.03.11 | 의안제목 : 신규시설 투자의 건 주요내용 : 생산Capa 확대 및 생산성 향상을 위한 클린룸 증축 |
찬성 |
| 5 | 2021.03.15 | 의안제목 : 제21기 정기주주총회 소집의 건 주요내용 : 제21기 정기주주총회 소집 및 회의 목적사항 결정 |
찬성 |
| 6 | 2021.04.09 | 의안제목 : 코스닥시장 상장을 위한 신주발행 승인의 건 주요내용 : 코스닥시장 상장을 위한 신주발행(515,000주) |
찬성 |
| 7 | 2021.06.10 | 의안제목 : 코넥스시장 상장폐지 및 코스닥시장 상장 결의의 건 주요내용 : 코넥스시장 상장폐지(4,371,005주) 및 코스닥시장 상장(4,886,005주) |
찬성 |
| 8 | 2021.07.02 | 의안제목 : 임시주주총회 소집의 건 주요내용 : 임시주주총회 소집 및 안건 결정 |
찬성 |
나. 이사회내 위원회에서의 사외이사 등의 활동내역
| 위원회명 | 구성원 | 활 동 내 역 | ||
|---|---|---|---|---|
| 개최일자 | 의안내용 | 가결여부 | ||
| - | - | - | - | - |
2. 사외이사 등의 보수현황
| (단위 : 백만원) |
| 구 분 | 인원수 | 주총승인금액 | 지급총액 | 1인당 평균 지급액 |
비 고 |
|---|---|---|---|---|---|
| 사외이사 | 1 | 800 | - | - | - |
(주1)상기 주총승인금액은 당사 제21기 정기주주총회에서 승인받은 금액이며, 사내이사를 포함한 보수한도액입니다.
II. 최대주주등과의 거래내역에 관한 사항
1. 단일 거래규모가 일정규모이상인 거래
| (단위 : 억원) |
| 거래종류 | 거래상대방 (회사와의 관계) |
거래기간 | 거래금액 | 비율(%) |
|---|---|---|---|---|
| - | - | - | - | - |
2. 해당 사업연도중에 특정인과 해당 거래를 포함한 거래총액이 일정규모이상인 거래
| (단위 : 억원) |
| 거래상대방 (회사와의 관계) |
거래종류 | 거래기간 | 거래금액 | 비율(%) |
|---|---|---|---|---|
| - | - | - | - | - |
III. 경영참고사항
1. 사업의 개요
가. 업계의 현황
(1) 용어설명
|
용 어 |
설 명 |
|---|---|
|
Robot |
다자유도를 가진 기구와 프로그램에 의하여 조작, 운전 및 제어가 가능한 기계 장치 |
|
FA (Factory Automation) |
기계장치와 프로그램에 의한 제어로 물류, 공정 및 생산을 자동화하는 시스템 |
|
Wafer |
반도체 칩 제조의 기초가 되는 결정질 실리콘(Si) 재료의 원형 모양의 기판으로, 크기는 주로 직경 200mm 와 302mm 크기 |
|
FOUP (Front Open Unified Pod) |
Wafer가 낱장으로 담겨지고 먼지 오염으로 부터 Wafer를 보호하기 위하여 전면 Open 되는 Door가 있는 표준 Cassette |
|
WTR (Wafer Transfer Robot) |
Wafer를 공정간 이송하는 Clean Robot으로 운전 환경에 따라 대기용 로봇과 진공용 로봇으로 구분 |
|
VTR (Vacuum Transfer Robot) |
진공환경에서 Wafer, Glass 등의 기판을 이송하는 로봇 |
|
BRS (Bare Reticle Stocker) |
반도체 회로가 새겨진 Reticle을 보관하는 자동 창고 로봇 |
|
EFEM (Equipment Front End Module) |
반도체 제조라인에서 공급된 FOUP로부터 Wafer를 이송로봇으로 꺼내어 공정 장비에 Loading / Unloading 하는 표준 자동화 모듈 |
|
Load Lock |
일반 대기 환경과 진공환경 사이의 버퍼역할을 하기 위한 장치 |
|
Backbone |
진공환경에서 Wafer를 이송하기 위하여 진공 로봇, 진공 챔버와 Load Lock으로 구성된 는 진공 이송 자동화 모듈 |
|
Platform |
대기환경에서 Wafer를 이송하는 EFEM과 진공환경에서 Wafer를 이송하는 Backbone 전체를 의미하며, 반도체장비의 물류를 담당하는 기본 자동화모듈 |
|
Cluster Tool |
진공로봇을 중심으로 다각형 진공 챔버와 Load Lock으로 구성된 Backbone |
|
Twin Backbone |
Wafer 이송 생산성 향상을 위하여 Wafer를 동시 2장 이송하는 진공로봇, 진공챔버 및 좌우 동일한 2개의 Load Lock으로 구성된 Backbone |
|
FPD (Flat Panel Display) |
평판 Glass 기판으로 구현한 Display |
|
Glass |
LCD, OLED, 박막 태양전지 등의 회로를 제조하기 위한 기초 기판 |
|
LTR (LCD Transfer Robot) |
LCD 기판을 이송하는 크린 로봇 |
|
CHR (Cassette Handling Robot) |
다수의 Glass가 적재된 Cassette를 공정간 이송하기 위한 로봇 |
|
Delta Robot |
3셋의 평행링크로 구성되어 가볍고 빠른 이송이 가능한 로봇으로 패러랠 로봇(Parallel Robot)이라고도 불림. |
|
Gripper |
로봇의 끝단에 부착하여 작업 대상물을 잡고 핸들링 하는 기구로 공압 또는 서보제어에 의하여 구동 |
|
Packaging 공정 |
음식료, 제약, 화장품 등의 산업에서 내용물을 보호하기 위하여 포장하는 공정 |
|
Incasing 공정 |
포장 Box에 제품을 넣는 자동화 공정 |
|
Vision Tracking |
컨베이어 등을 통하여 이동되는 물체를 로봇이 Vision에 의한 인식으로 이동 물체를 따라가며 Handling 하는 기술 |
|
Palletizing 공정 |
포장 물류 자동화 라인에서 포장된 Box를 이동시키기 위하여 Pallet 위에 다층으로 적재하는 공정 |
(2) 사업의 개요
당사는 2000년 3월 설립하여 제조업용 로봇(Robot)과 자동화 시스템(FA)을 개발 공급하고 있는 회사입니다. 당사의 주요 사업은 1) 반도체 제조라인에서 Wafer를 이송하는 반도체 로봇 및 자동화 모듈, 2) LCD와 OLED 제조라인에서 Glass를 이송하는 FPD 로봇 및 자동화, 3) 제약 및 바이오 제조라인에서 사용되는 제조업용 로봇 및 자동화 시스템입니다.
(3) 반도체 라인과 진공 이송 모듈
|
|
|
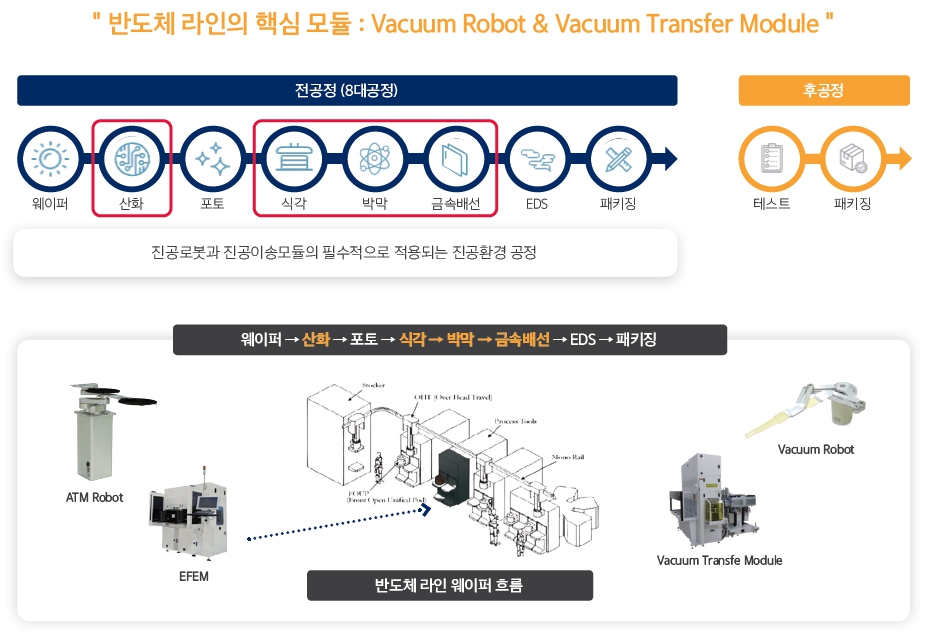
반도체 라인 웨이퍼 흐름 |
반도체 제조 라인은 실리콘 웨이퍼에 고 직접회로를 물리, 화학적으로 가공하기위한 청정 제조 라인으로 대표적인 라인 구성은 그림과 같습니다. 웨이퍼의 가공 공정은 포토 공정에서 회로를 웨이퍼 표면에 그리는 것으로 시작합니다. 이후 식각(Etching), 증착(Deposition), 이온주입(Ion Implanting) 박막 형성 (Metalizing) 등의 가공을 하여 반도체를 제조하게 됩니다. 웨이퍼가 반도체 Fab에 투입되면 수십Km 에 달하는 거리를 이동하면서 50 ~ 60일 동안 500 ~ 700 개의 공정을 거처 반도체 Wafer 가 제조 됩니다.
이 반도체 제조 라인에서의 식각, 증착, 박막 등의 공정은 진공 환경 내에서 물리, 화학적으로 웨이퍼에 회로를 가공하는 핵심 공정입니다. 반도체 장비 중 식각(Etcher), 증착(Deposition), 박막(Metalizing) 등 진공 환경 내에 서 회로를 가공하는 장비가 반도체 제조와 공정 장비기술의 핵심이고, 이 진공환경 반도체장비의 비중이 제조라인 전체의 30 ~ 40%를 차지하고 있습니다.
 |
|
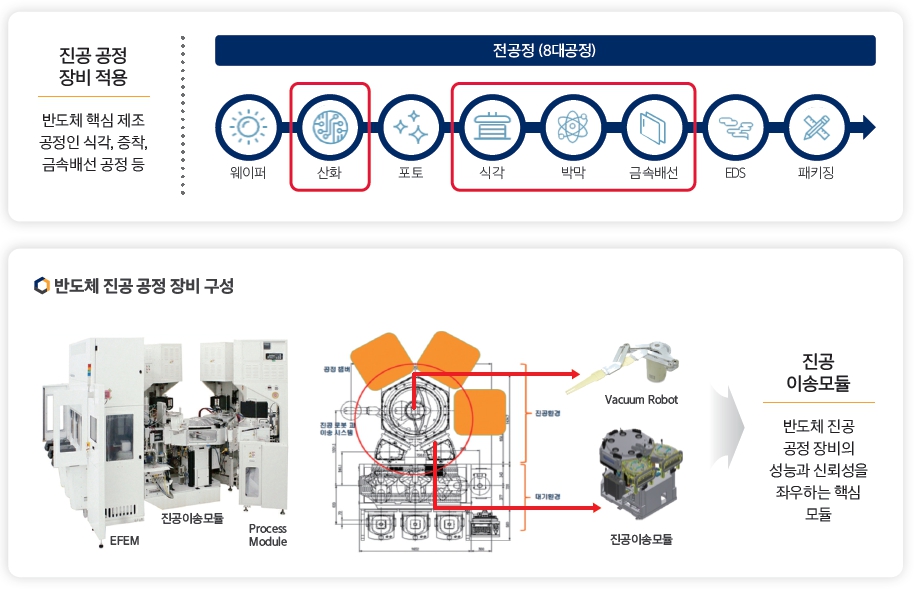
진공로봇과 이송모듈 |
진공 공정 장비는 대기 환경에서 EFEM을 통하여 웨이퍼를 공급받아, 진공 환경과 평형을 만들고 진공 환경 내에서 로봇이 공정 챔버에 웨이퍼를 공급하는 모듈이 있는데 이 모듈이 [반도체 웨이퍼 이송 진공로봇 과 이송 모듈] (Backbone이라고도함) 이며, 반도체 진공 공정 장비의 생산성과 성능을 좌우하는 핵심 모듈입니다.
 |
|
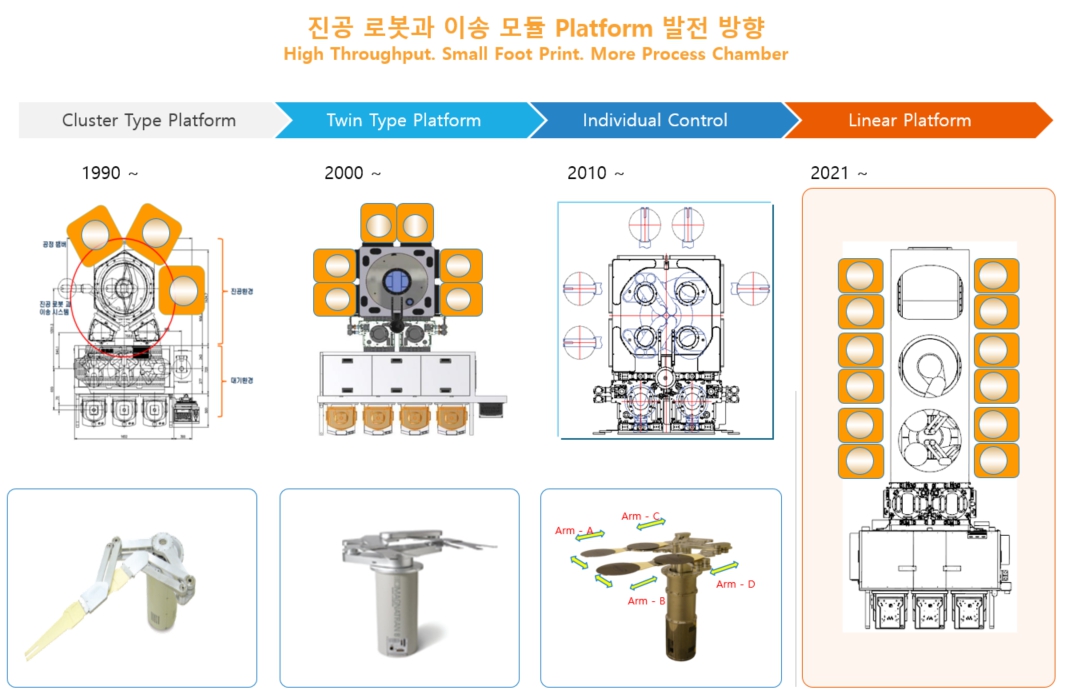
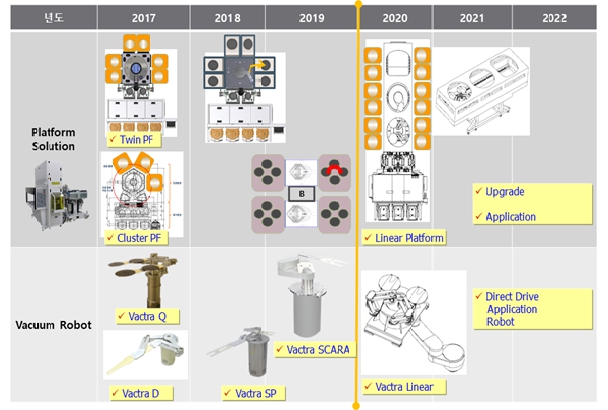
진공로봇과 이송 모듈 발전 방향 |
반도체 장비에 있어서 진공 로봇과 이송 모듈은 생산성과 신뢰성을 좌우하는 핵심이고, 제조 공정이 고도로 발전하면서 진공환경 웨이퍼 이송 로봇과 이송 모듈에 요구되는 기술과 성능도 한층 높은 수준이 요구되고 있습니다. 반도체 제조라인과 반도체 장비에서 이송 로봇과 이송 모듈에 요구되는 사항을 요약하면 첫째 ‘반도체 장비에서 단위 시간당 많은 Wafer를 가공하기 위한 생산성 향상’, 둘째 ‘고 비용의 제조라인을 효율적 운용을 위한 Foot Print 축소’, 셋째 ‘많은 공정 챔버 장착에 대응’이며 이러한 시장의 요구에 따라 진공 로봇 과 이송 모듈은 Cluster 형태에서 Twin 형태로 발전하였고, 향후에는 다수의 공정 챔버를 대응할 수 있는 Linear 이송 모듈이 요구 됩니다.
나. 회사의 현황
(1) 영업개황 및 사업부문의 구분
(가) 영업개황
1) 사업의 개황
당사는 2000년 3월 14일 인천광역시에 본점을 두고 사업을 개시하였습니다. 설립자 및 창립 구성원들의 경험과 경력을 기반으로 로봇과 자동화 분야에 지속적이고 꾸준한 개발과 제품 공급을 통하여 회사의 정체성을 확립하고 시장에서 고객을 확보하고 있습니다.
당사는 자체개발한 Cluster Type 진공 로봇과 이송모듈을 2010년부터 SK하이닉스 양산라인에 공급하여 신뢰성을 평가받았고, 지금까지도 공급하고 있어 진공로봇 국산화에 성공하였습니다. 또한 Twin Type 대응 개별제어 4 Arm 진공로봇과 이송모듈은 2015년부터 SK 하이닉스 양산라인에 공급되어 해외 경쟁사 대비 차별적 기술 우위를 인정받아 적용 공정을 확대 하고 있는 중입니다.
 |
|
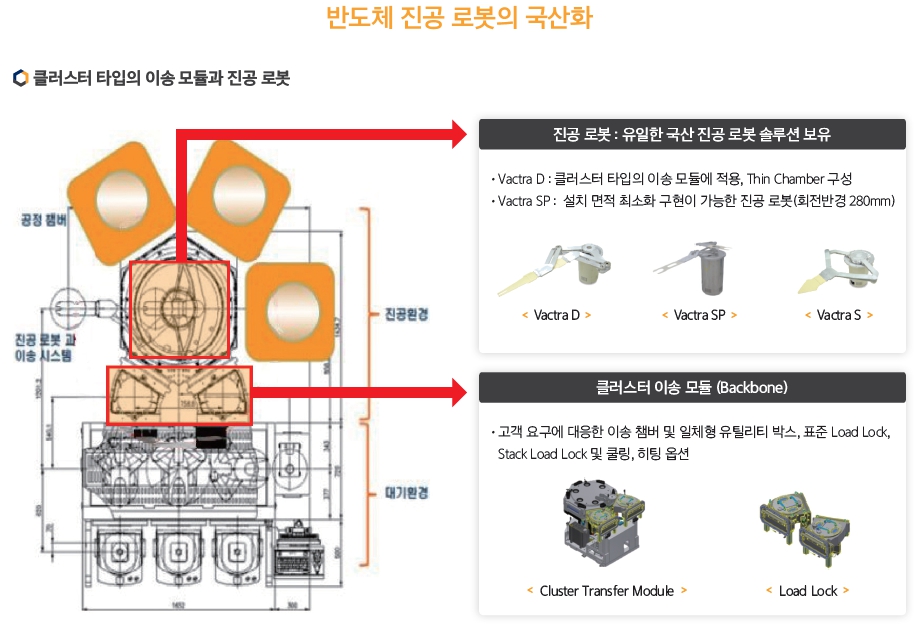
반도체 진공 로봇과 이송모듈 |
2017년부터는 개별제어 4 Arm 진공 로봇 과 Cluster 형 진공로봇의 성능 과 신뢰성 평가를 받아 2018년에는 삼성 양산라인에 5개 공정 데모를 진행하였고 최근 양산인증을 받아 양산 공급을 시작하고 있어 향후 많은 시장 확대를 기대하고 있습니다. 또한 2019년에는 국내 장비회사를 통하여 중국 메모리 회사 와 미국 반도체 회사에도 당사의 진공 로봇 과 이송모듈이 공급되어 평가 중입니다.
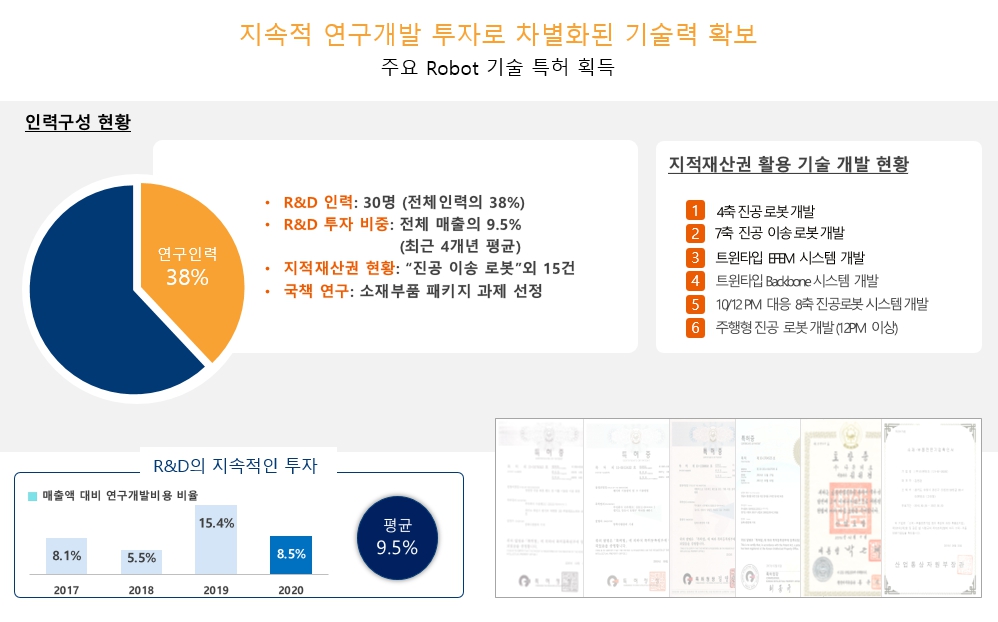
당사는 꾸준한 기술개발을 통해 “세계 최고의 제품을 시장에 판매한다”는 모토로 기술기반 기업으로 성장하고 있습니다. 제품 개발을 위해 지속적으로 R&D투자와 기술인력을 양성하고 있으며 또한 아래 표에서 보듯이 당사의 매출액 대비 R&D 투자 비중은 최근 평균 10% 수준으로 우리나라 중소기업의 매출액 대비 R&D 평균비율 2.8%(2020년 중소기업기술통계조사 보고서 인용)를 훨씬 상회하고 있고 R&D인력도 전체 인원의 약 38%를 차지하고 있습니다.
[최근 매출액 대비 R&D 투자]
 |
|
연구개발 현황 |
2) 사업의 구조 및 제품 설명
당사의 주력 제품은 ① 반도체 제조라인에서 Wafer를 이송하는 로봇과 Wafer 이송 자동화 Tool인 EFEM과 Backbone으로 구성된 Platform, ② FPD 제조 라인에서 Glass와 Cassette를 이송하는 로봇과 진공환경에서 기판을 이송하는 자동화 모듈인 Cluster Tool ③ 제약 및 바이오 제조라인의 Packaging 공정에서 제품을 고속으로 이송하는 델타 로봇과 로봇을 이용한 제조라인 자동화 시스템입니다.
① 반도체용 로봇 및 자동화
당사는 2007년부터 반도체 진공환경 이송 로봇과 이송 모듈을 개발하여 시장의 요구사항과 기술 발전에 따라 차별적 선도적 기술을 개발하여 왔습니다. 반도체 웨이퍼 이송 로봇은 대기환경에서 작동하는 대기환경용 로봇과 진공 내에서 로봇이 작동하는 진공환경용 로봇으로 구분됩니다. 대기환경용 로봇은 일반적인 모터와 감속기 등의 배치가 자유롭고 기술적 난이도가 높지 않아 국내 몇몇 기업이 개발하여 반도체 라인에 적용 중입니다.
진공환경용 로봇은 고온. 고진공 환경에서 파티클 발생이 없이 웨이퍼를 핸들링 하여야 하므로 진공 챔버 바깥에서 모터, 감속기 등으로 구동하고 진공환경을 파괴하지 않도록 실링 메커니즘을 통하여 진공 챔버 내부로 동력을 전달한후 다축 모션 기구를 구현하여 웨이퍼를 이송하는 로봇 Arm 구조로 되어있습니다. 따라서 고온. 진공환경에서 파티클 발생 없이 웨이퍼를 이송하는 이송로봇 메커니즘 기술, 다축으로 진공 실링을 하면서 동력을 전달하는 실링 구동 및 제어기술 이 필요합니다. 그동안 국내 몇 회사가 반도체 진공로봇의 국산화 개발을 시도하였으나 시장 진입 장벽 과 기술장벽을 넘지 못하였고, 진공로봇을 개발하여 양산 적용중입니다.
 |
|
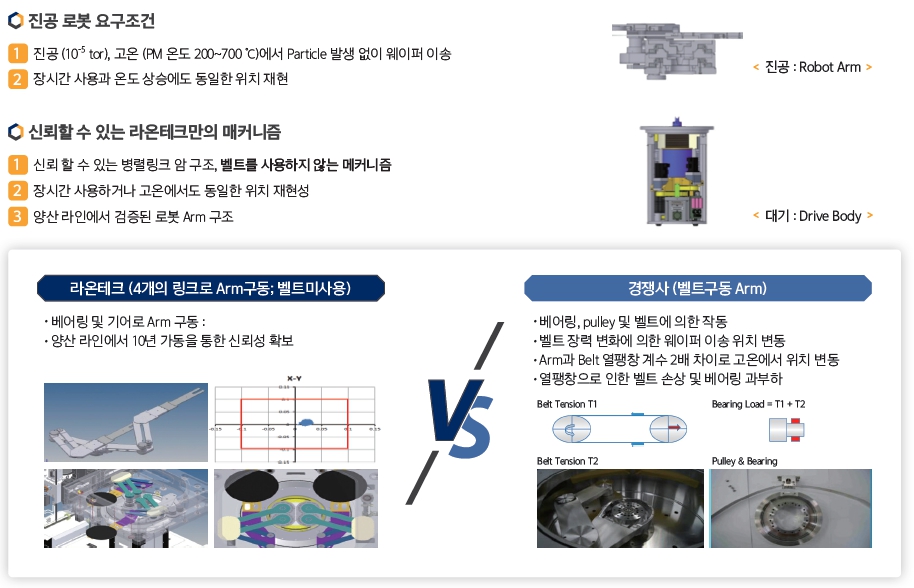
주요기술 |
당사는 고온, 진공환경에서 파티클 발생 없이 신뢰성 있는 웨이퍼 이송을 위하여 4 Bar Linkage 기구를 적용하고 관절에는 백래쉬 조절과 제어가 가능한 기어를 적용하여 진공 챔버 내로 전달된 회전 운동을 직선으로 구현한 로봇 Arm을 개발하였습니다. 신뢰성 있는 링크 와 백래쉬를 제거한 기어 전동 기구를 사용하여 로봇을 장기간 사용하여도 위치 정밀도 변화가 없으며, 700 ℃ 이상의 고온 공정에서도 열팽창에 의한 응력이 없어 신뢰성 있는 웨이퍼 이송을 할 수 있는 로봇 Arm을 개발 적용하고 있습니다.
 |
|
주요기술2 |
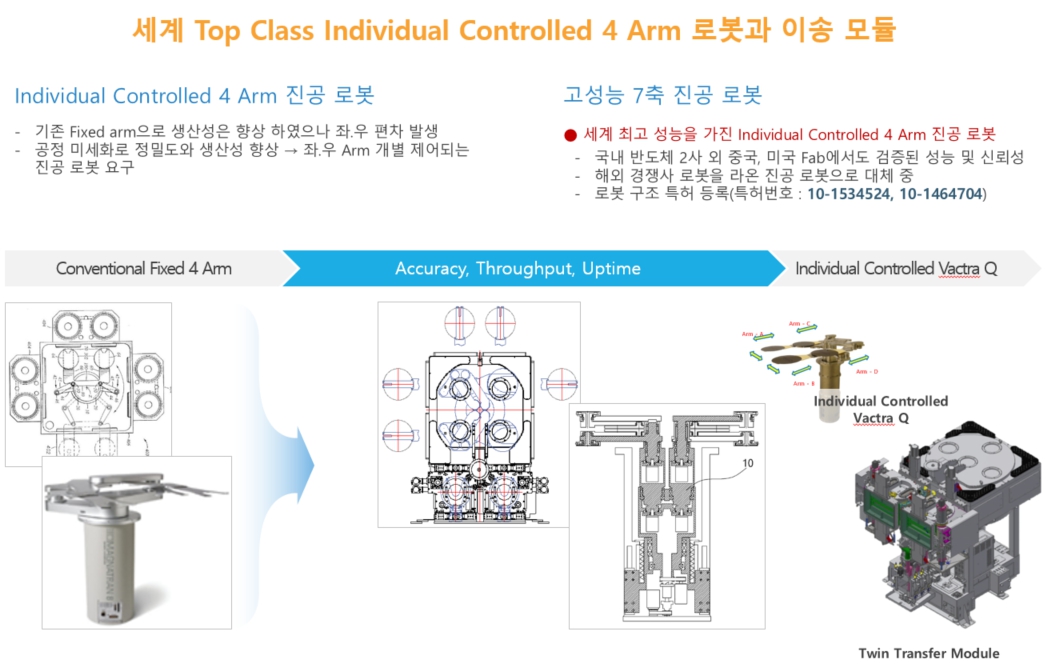
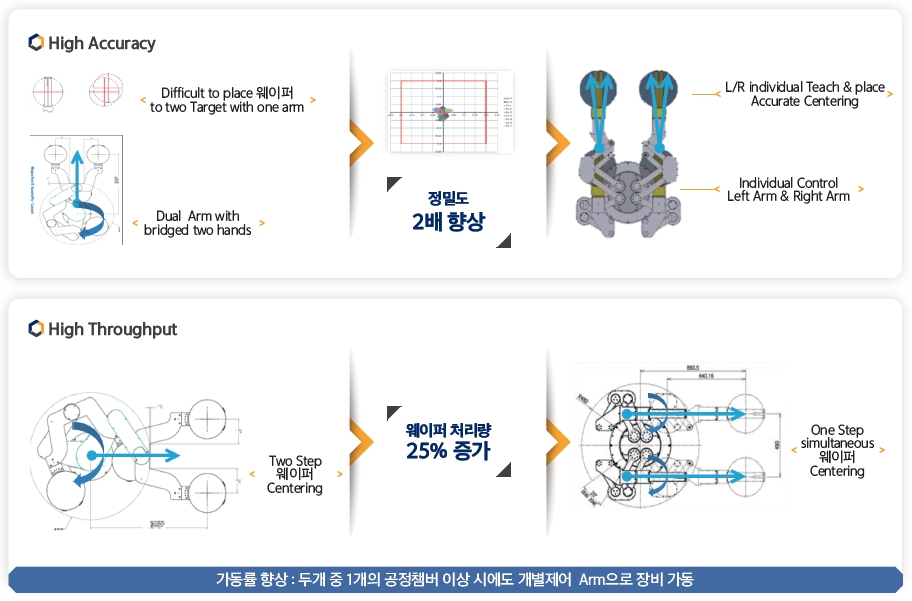
최근 공정시간이 짧은 반도체 장비와 Foot Print를 작게 하면서 다수의 공정 챔버를 장착하기 위하여 두 개의 공정 챔버를 나란히 배치하고 진공 로봇이 두장의 웨이퍼를 동시에 이송하는 이송 모듈이 Twin Type 이송 모듈입니다. 이 이송 모듈은 생산성, Foot Print, 다수 챔버 장착 등 시장의 요구사항에 부합하여 적용이 확대 되고 있습니다. 그러나 하나의 진공 로봇 Arm이 두장의 웨이퍼를 공정 챔버에 공급하면서 정확한 위치에 로딩이 어렵고, 웨이퍼 틀어짐을 보정하는 AWC (Auto Wafer Centering) 기능을 적용하여도 두 스텝 보정을 하여 속도가 떨어지는 문제가 있어 반도체 소자업체에서는 두 개의 로봇 Arm 이 개별적으로 제어되는 진공 로봇 기술이 요구되고 있습니다.
 |
|
주요기술 |
당사는 고객과 시장의 요구사항을 반영하여 4개의 Arm이 개별적으로 제어되는 세계 최고 수준의 진공로봇을 개발하여 2015년 반도체협회 양산평가 프로그램으로 반도체 양산라인에서 양산성 평가를 완료 하였고, 고온 증착 공정과 메탈 공정에 양산 적용하고 있습니다.
진공 환경에서 개별 제어되는 4 Arm 로봇을 개발 공급하고 있는 회사는 일본의 ULVAC 과 미국의 Brooks 사 와 한국의 라온테크 3사만이 양산 공급하고 있는 중이며, 최근 양산라인에서 타사 대비 성능과 신뢰성을 높게 평가 받아 외국 제품들을 급속히 국산화 대체 중에 있습니다.
② FPD용 로봇 및 자동화
LCD 제조라인은 여러 장의 Glass를 Cassette에 넣어 이송하고 Glass 이송 로봇이 기판을 Cassette에서 공정 장비로 이송하는 제조라인으로, 카세트 이송 로봇과 Glass 이송 로봇을 많이 필요로 합니다. OLED 제조 라인은 진공환경에서 증착과 봉지 공정이 많아 진공환경에서 기판을 이송하는 로봇과 Cluster Tool과 같은 진공 이송 물류 시스템이 많이 필요합니다.
당사는 소형 2세대 급 기판에서부터 대형 8세대 급 기판을 진공에서 이송할 수 있는 진공 로봇 제품 라인업이 되어 있습니다. 또한 Load Lock과 진공 챔버로 구성된 자동화 이송 모듈인 Cluster Tool도 세대별 모델을 갖추고 공급하고 있습니다
 |
|
제품 라인업 |
③ 패키징 공정용 로봇 및 자동화
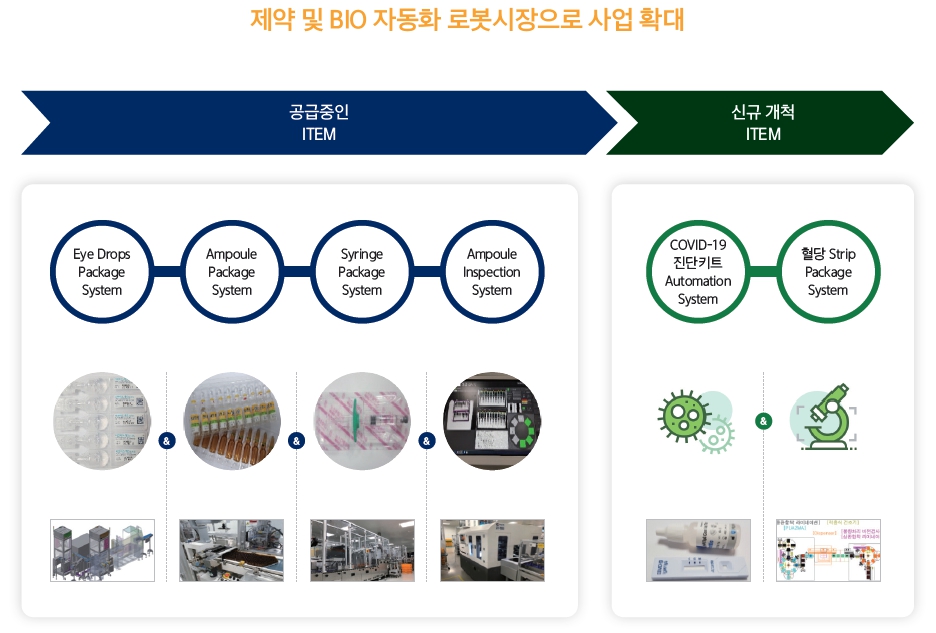
제약 및 바이오등 제품 (점안제, 앰플, 시린지) 생산 공정은 약품 제조후 충진, 이물검사, 공급기 등을 통한 조립공정을 수행하여 단위 제품을 생산하고, 생산된 단위 제품등을 패키징 공정에서 포장과 검사후 Boxing 출하합니다. 제품의 분류와 1차 포장기 투입, 1차 포장 제품을 포장 Box에 투입하는 Incasing 등의 공정에서 로봇을 사용하는데, 가볍고 고속이며 설치 공간이 효율적인 델타 로봇을 많이 사용합니다.
패키징 및 검사 공정에서 생산현장 맞춤형 설계 및 공정 Layout의 최적화된 자동화 시스템은 품질 및 원가 경쟁력을 갖습니다.
당사는 패키징 공정 자동화 시스템을 모듈화된 Unit 개념으로 구성하고 필요에 따라 모듈을 가감하는 형태의 시스템을 제공하여 가격 및 품질 경쟁력을 갖춘 로봇 및 모듈을 제공하고 있습니다.
당사 공급아이템으로 점안제, 앰플, 시린지등의 패키징자동화 및 검사자동화등이 있고 신규 아이템으로 신속성과 기술력이 세계적인 주목 받고 있는 의료용 진단부문 제조공정중 수작업으로 생산하는 공정등의 Full Automation화을 추진하고 있습니다.
 |
|
패키징 공정용 로봇 |
 |
|
패키징 공정용 로봇 및 자동화 |
(나) 공시대상 사업부문의 구분
한국표준산업분류 기준상 분류로는 산업용로봇 제조업(분류코드:C29280)으로 구분하고 있습니다.
(2) 시장 규모 및 전망
1) 반도체 로봇과 자동화 분야
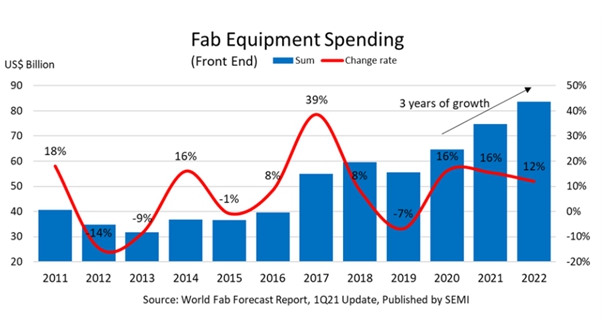
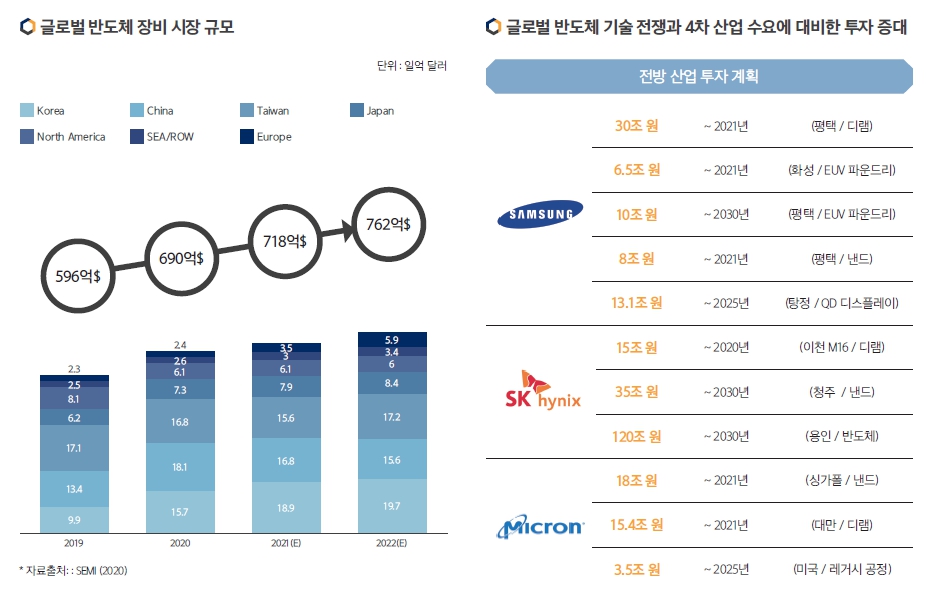
국제반도체장비재료협회(SEMI)에 따르면 글로벌 반도체 산업의 팹 장비 투자액은 지난해 16% 성장했으며 2021년에는 15.5% 더 성장해 700억달러(약 79조2000만원)을 넘어설 전망입니다. 2022년에는 12% 상승해 800억달러 이상을 기록할 것으로 전망했습니다.
전체 반도체 팹 장비 투자액은 파운드리와 메모리가 이끌고 파운드리 분야의 투자액은 올해 320억달러로 전년 대비 23% 증가할 것으로 보이며 내년에는 큰 성장세는 없이 올해와 비슷한 수준의 투자 규모로 전망됩니다.
메모리 분야에 대한 투자액은 올해 280억달러로 한 자릿수 성장률이 예상되며 특히 D램 분야에 대한 투자는 낸드플래시를 앞설 것으로 보입니다. 내년 메모리 분야의 장비 투자액은 D램과 3D 낸드플래시 투자에 힘입어 26% 급증할 것으로 전망됩니다.
 |
|
전세계 반도체 팹 투자액 |
 |
|
글로벌 반도체 장비 시장 현황 |
반도체 진공 공정 장비를 공급하는 회사는 Applied Materials, Lam Research, TEL 등 외국장비 회사와 국내 주성엔지니어링, TES, 원익IPS, 유진테크, 세메스 등 국내 장비회사가 있습니다. 세계 진공 공정 장비 시장의 90% 이상을 외국 회사가 차지하고 국내 장비회사의 점유율은 10% 이하 입니다. 그나마 국내에서는 삼성전자와 SK하이닉스의 공정장비 국산화를 추진하여 국내 진공 공정장비 시장의 약 25%는 국내 장비회사가 시장을 점유하고 있습니다.
국내 반도체장비 회사 중 진공 공정장비 회사의 매출 규모는 2019년 전 세계 반도체 시장의 하락으로 다소 침체되었지만 평균 2조5천억 정도로 세계시장의 5%~10% 정도이고, 국내 장비 회사의 로봇과 이송모듈의 국내 시장 규모는 평균 2천억원을 상회하며, 해외 수입장비를 통해 도입되는 것을 포함하면 8천억 규모로 추정됩니다.
|
회사명 |
2018년 |
2019년 |
2020년 |
Item |
|
세메스 |
1,856,467 |
1,133,847 |
2,214,347 |
Etcher, Cleaner, Coater |
|
원익 IPS |
649,313 |
669,242 |
1,090,924 |
PECVD, ALD |
|
피에스케이 |
303,846 |
154,612 |
265,730 |
Asher |
|
테스 |
287,069 |
178,374 |
245,967 |
PECVD, |
|
주성엔지니어링 |
118,545 |
254,580 |
263,006 |
CVD, ALD |
|
유진테크 |
220,178 |
205,467 |
202,591 |
LP CVD, Plasma |
|
APTC |
61,038 |
59,326 |
93,030 |
Poly Etch |
|
매출 합계 |
3,496,456 |
2,655,448 |
4,375,595 |
|
|
장비매출 (80%) |
2,797,165 |
2,124,358 |
3,500,476 |
서비스 및 기타 매출 20% |
|
Robot & Transfer Module |
279,716 |
212,436 |
350,048 |
장비 매출의 10% |
2) FPD 로봇과 자동화 분야
FPD 분야의 Glass 이송 로봇은 대기환경에서 이송하는 로봇과 진공환경에서 기판을 이송하는 진공 물류 분야로 구분할 수 있습니다. 대기환경용 로봇은 일본의 Yaskawa, Sankyo 등의 회사와 국내의 현대중공업, 로보스타 등의 회사가 시장을 선점하고 있습니다.
최근 디스플레이 기술의 발전은 UHD를 넘어 Flexible과 OLED의 양산 기술이 확보되는 상황으로 변화되고 있으며, 이송 메커니즘도 기존 대기환경 이송에서 OLED 패널을 수분과 산소로부터 보호하기 위하여 진공 이송 로봇과 물류 시스템으로 변화하고 있습니다. 진공 이송 로봇 분야에서 일본의 Sankyo, Daihen 등과 국내 업체인 티이에스가 국내 시장에 진입해 있습니다. 당사는 오랜 기술 개발과 링크 구동을 통한 차별화된 구조로 진공로봇 시장 진입에 성공하였습니다.
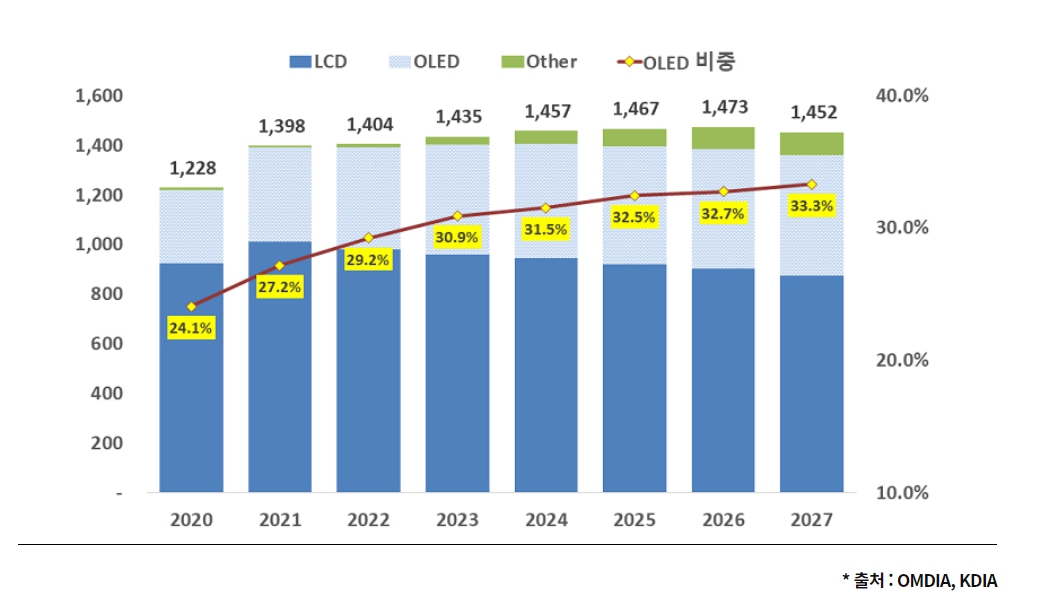
2021년 세계 디스플레이시장은 개선세를 보일것으로 예상되며 해외생산 확대와 중국기업 부상으로 LCD에서 부진이 계속되겠지만, OLED로 전환 가속화, 화웨이 제재에 대한 반사이익 등으로 2021년 상반기부터 디스플레이는 여건이 개선된다는 전망입니다.
 |
|
디스플레이 장비시장1 |
3) 델타로봇과 자동화 분야
병렬로봇의 한 형태인 델타로봇은 End Effector에 여러 개의 링크를 통해 구동되기 때문에 가볍고, 강성이 높아 고속 구동에 적합합니다. 이런 특성으로 델타로봇은 제약, 바이오 등 대량 생산 시스템에서 고속으로 작업을 하는데 많이 사용되고 있습니다. 특히 구조적 단순함으로 분진 발생이 적고, 무균 시스템 구성이 용이하여 위에 언급된 분야에 적합한 로봇입니다. 통상 로봇을 일반 제조업체가 구입해서 자동화에 적용하는 것보다는 로봇 자동화 시스템을 통해 구입하는 것이 일반적이어서 ABB, Adept등 해외 유명 델타로봇 메이커도 로봇 자동화 시스템 전문 메이커와 긴밀한 협조 관계를 유지하고 있습니다. 대량 생산 공장이 많은 아시아권에서 델타로봇을 이용한 시스템 확산이 급격히 이루어지고 있습니다.
(3) 시장의 특성
최근5G 이동통신 서비스가 시작되면서4차 산업혁명 시대가 본격적으로 도래하고 있으며, 코로나19의 대유행으로 비대면과 네트워크로 대변되는 디지털 혁명이 더욱 빠르게 진행될 것으로 전망하고 있습니다. 반도체는4차 산업혁명(Digital Transformation) 기본 인프라입니다. 사물인터넷, 클라우드, 빅데이터, 인공지능에 필요한 모든 정보는 디지털화 되어야 하므로 반도체의 수요는 지속적이고 폭발적으로 늘어나 현재의10배 이상의 반도체가 필요할 전망입니다.
 |
|
시장의 특성 |
(4) 신규사업 등의 내용 및 전망
4차 산업 혁명에 의하여 모든 것이 연결되고 지능화되면서 반도체 수요는 꾸준히 지속적으로 성장하고 있으며, 규모가 크고 성장하는 시장에서의 기술 개발과 시장 경쟁은 치열합니다. 현재 개발된 반도체 웨이퍼 이송 진공 로봇과 이송 모듈을 기반으로, 차세대 시장에서 요구되는 기술 과 제품을 꾸준히 개발하고 있습니다. 진공 로봇 분야에서는 다수 진공 챔버를 로봇 한 대로 대응하기 위한 로봇과 Direct Drive 등에 대응하기 위한 차세대 제어기 개발이 필요합니다.
진공 이송 모듈은 새로운 기능을 탑재한 핵심 콤포넌트들의 개발이 필수적이고, 이에 따라 차세대 시장에서 요구하는 다수 챔버 대응 이송 모듈을 개발하여 시장 출시할 예정입니다.
 |
|
linear형 진공로봇과 이송 모듈 |
특히 Linear 형 진공로봇과 이송 모듈은 차세대 기술 선도와 기술 선점을 위하여 중점 개발 중입니다. 경쟁사들은 2 Arm 진공 로봇을 챔버 내에 설치하고 주행 축으로 이동하는 구조로 개발 중이나 라온테크는 4 개 Arm 이 개별 제어되는 로봇을 3 Link Arm 으로 주행 시키는 차별적 구조로 (특허 출원중) 개발하고 있습니다. 설치면적이 작으면서 공정 챔버를 12개까지 대응하며 4 Arm 으로 생산성 향상이 가능한 제품으로 Linear 형 이송 모듈에서 기술을 선도하고자 합니다.
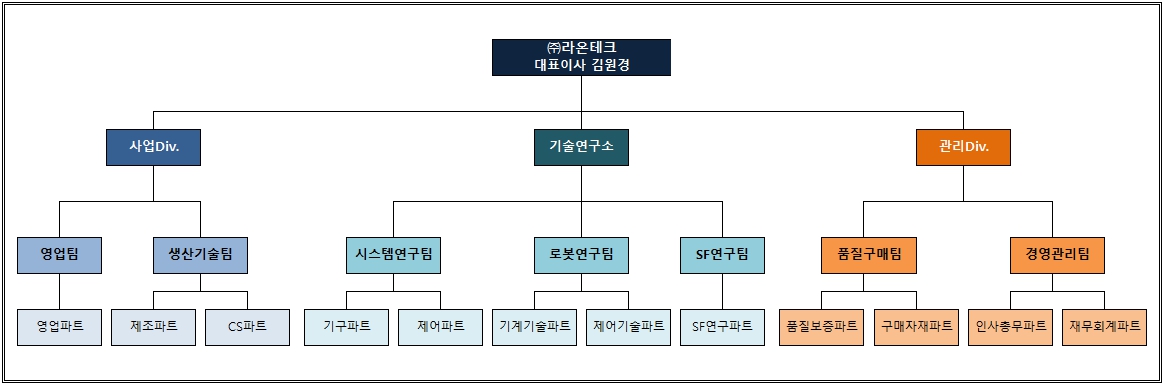
(5) 조직도
 |
|
라온테크 조직도 |
2. 주주총회 목적사항별 기재사항
□ 이사의 선임
가. 후보자의 성명ㆍ생년월일ㆍ추천인ㆍ최대주주와의 관계ㆍ사외이사후보자 등 여부
| 후보자성명 | 생년월일 | 사외이사 후보자여부 |
감사위원회 위원인 이사 분리선출 여부 |
최대주주와의 관계 | 추천인 |
|---|---|---|---|---|---|
| 박영순 | 1959.9.1 | 여 | 부 | - | 이사회 |
| 총 ( 1 ) 명 | |||||
나. 후보자의 주된직업ㆍ세부경력ㆍ해당법인과의 최근3년간 거래내역
| 후보자성명 | 주된직업 | 세부경력 | 해당법인과의 최근3년간 거래내역 |
|
|---|---|---|---|---|
| 기간 | 내용 | |||
| 박영순 | 기업인 | 1979.03 ~ 1986.02 2011.01 ~ 2012.12 2013.01 ~ 2020.12 2021.03 ~ 현재 |
한양대학교 기계공학 (前) (주)케이씨텍 대표이사 (前) (주)티씨케이 대표이사 (現) (주)메카로 사외이사 |
해당사항없음 |
다. 후보자의 체납사실 여부ㆍ부실기업 경영진 여부ㆍ법령상 결격 사유 유무
| 후보자성명 | 체납사실 여부 | 부실기업 경영진 여부 | 법령상 결격 사유 유무 |
|---|---|---|---|
| 박영순 | 해당사항없음 | 해당사항없음 | 해당사항없음 |
라. 후보자의 직무수행계획(사외이사 선임의 경우에 한함)
|
<후보자 : 박영순> 3. 책임과 의무에 대한 인식 및 준수 : 본 후보자는 선관주의와 충실 의무, 보고 의무, 감시 의무, 상호 업무집행 감시 의무, 기업비밀 준수의무 등 상법상 사외이사의 의무를 인지하고 있으며 이를 엄수할 것입니다 |
마. 후보자에 대한 이사회의 추천 사유
| 해당 후보자는 타회사의 대표이사로 재직한 경력을 바탕으로 사외이사의 직무를 충분히 이해하고 있으며, 대주주 등과의 독립된 지위에서 회사의 주요 의사결정에 참여함으로써 주주 이익을 극대화 할 것으로 판단되어 사외이사 후보자로 추천함. |
확인서
 |
|
확인서_210727 |
※ 기타 참고사항
IV. 사업보고서 및 감사보고서 첨부
가. 제출 개요
| 제출(예정)일 | 사업보고서 등 통지 등 방식 |
|---|---|
| - | - |
※ 임시주주총회로 해당사항이 없습니다.
나. 사업보고서 및 감사보고서 첨부
임시주주총회로 해당사항이 없습니다.
※ 참고사항
|
□ 코로나바이러스감염증-19 (COVID-19)에 관한 안내 - 코로나바이러스 감염증-19(COVID-19)의 감염 및 전파를 예방하기 위하여, 총회장 입구에 설치된 열화상 카메라로 총회에 참석하시는 주주님들의 체온을 측정할 수 있으며, 발열이 의심되는 경우 출입을 제한할 수 있음을 알려드립니다. - 정부의 사회적 거리 두기 정책 실시 및 주요 방역조치 지침에 따라, 각 단계별 집합ㆍ모임 인원이 제한(한정)되어 있는바, 주주총회 개최 당일의 사회적 거리 두기 단계 상황에 따른 정부 방침이나 명령에 따라 총회 참석 인원이 제한될 수 있음을 양해 부탁드립니다. |